UBOS state
/docs/gears/developer/reference/ubos-state/
State diagram
A UBOS Device can be thought of as always being in a particular state. The following diagram shows these as a state chart:
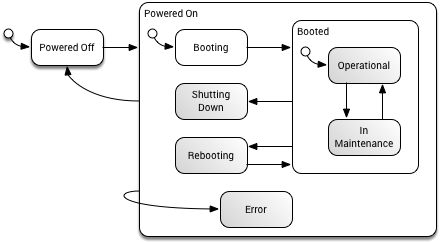
A UBOS Device can either be in one of the following two major states:
- “Powered Off”, or
- “Powered On”.
When “Powered On”, initially it is:
- “Booting”, until the boot process is complete and it is in state
- “Operational”.
- While
ubos-adminis running, the device is in “In Maintenance”.
Once ubos-admin completes, the device goes back to being “Operational”.
The device can further be:
- “Shutting Down”, going back to “Powered Off”, or
- “Rebooting”, going back to “Operational”.
While it hopefully never happens, the device can also be in state:
- “Error”.
If the device enters one of the states shown with a gray background, a state transition callback is performed as described next.
State transitions
When UBOS transitions from one state to another, it invokes callbacks defined in
/etc/state-callbacks. Callbacks are defined as follows:
- Each file in
/etc/state-callbacksdefines one callback - Each callback file consists of a single line with the fully-qualified name of a
Perl module with optional arguments that are passed-on verbatim, e.g.
Some::Where::Callback a 17. - The Perl class must have a subroutine called
stateChanged, which will be invoked when the device state changes. Arguments to the subroutine are:- the name of the new state
- the remaining arguments from the callback file
So in this example, the invocation may be
Some::Where::Callback::stateChanged( 'Operational', 'a', 17 );
The values for the states are the same as the gray-shaded states shown in the
diagram, except that blanks are removed: Operational, InMaintenance,
ShuttingDown, Rebooting and Error.